Ⅰ. 서론(목적)
물체의 시간에 따른 회전 각과 각속도를 측정하는 방법을 알고 에너지 보존 법칙을 통해 질량, 반지름, 가속도를 이용해 회전 관성을 추정할 수 있다.
Ⅱ. 이론적 배경
1. 각속도와 각가속도

각속도는 강체가 회전할 때, 강체의 각변위를 시간 변화로 나눈 것으로 (1)과 같다.
접선속도는 각속도와 반지름의 곱과 같다.
각가속도는 회전하는 강체의 각속도 변화를 시간 변화로 나눈 것으로 (4)와 같다.
식(3)에 의해, 구심가속도는 (6)과 같다.
2. 돌림힘과 각운동량
돌림힘은 어떤 축에 대하여 힘이 물체를 회전시키고자 하는 경향을 나태는 벡터양이다. (7)과 같이 정의한다.
각운동량은 (8)과 같이 정의한다.
3. 회전관성
식(9)의 mr^(2)의 항이 F = dp/dt =mdv/dt에서 m에 해당하고, 이는 회전관성 I라 정의되며 다음과 같이 정리할 수 있다.
회전하는 물체가 강체이고 w_i=w로 일정하게 회전하고 있을 때,
회전축이 정해져 있고 물체의 질량 분포가 연속적이라면 식(10)에 의해, 회전관성은 식 (13)과 같다.
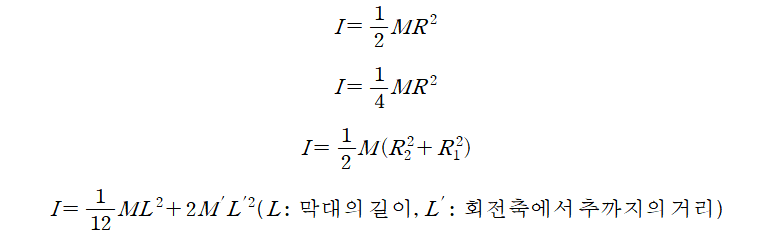
질량 분포가 연속적인 고리 모양의 강체가 그림 1과 같이 회전한다고 할 때, 회전 관성은 다음과 같이 구할 수 있다.
고리 모양의 경우 R_1이 유한한 값을 갖고, 원판 모양의 강체인 경우 R_1은 0이 되므로 원판의 회전 관성은 (1/2)*(MR^2)이다.
물체가 그림 2와 같이 놓여 있다고 할 때, 다음과 같다.

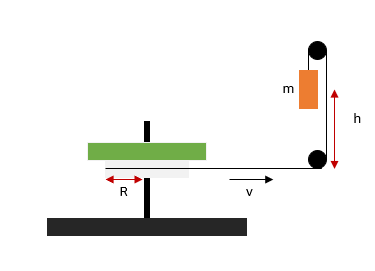
그림 3과 같이 실험을 진행한다. 에너지 보존 법칙을 이용하여,
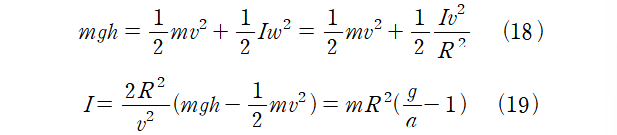
임을 알 수 있다. 이때, 측정하고자 하는 물체의 회전 관성을 구하여야 하므로 물레(회전축)의 회전 관성을 제하는 것에 주의해야 한다.
4. 오차
측정값의 오차의 한계는 측정기기의 눈금의 절반에 해당한다. 이 오차의 한계는 불정확도와 관련되어 있으며, 이를 이용해 측정값의 가능한 범위를 결정할 수 있다.
실험에 의한 오차는 우연 오차와 계통 오차로 나눌 수 있다. 우연 오차는 실험에서 통제할 수 없거나 알 수 없는 원인에 의해 생기는 오차이다. 우연 오차는 실험을 반복하여 확률에 의해 통계적으로 처리해 오차를 작게 할 수 있다. 계통 오차는 오차의 원인이 분명하고 보정이 가능한 오차이다. 계통 오차는 실험을 반복하여도 알아내기 어렵다. 예를 들어, 타이머를 이용해 시간을 잴 때, 사람이 측정함에 따른 오차는 반복하면 오차가 줄어들기 때문에 우연 오차가 될 것이고, 타이머의 시간이 5% 빠르게 흐르게 되어있다면, 이는 계통 오차가 될 것이다.
Ⅲ. 실험 방법
1. 실험 준비물
지지대, 회전축, 베어링, 도르래, 걸개, 추, 원판, 고리, 막대, Pasco Capstone 프로그램, 실
2. 실험 방법
1) 회전축과 지지대를 설치한다. 회전축과 지지대를 베어링으로 연결해 회전마찰을 줄여준다.
2) 도르래와 걸개를 이용하여 추를 그림과 같이 설치한다.
3) 회전축과 실의 장력이 걸리는 부분이 수직이 되도록 실을 감고 도르래 위치를 조절한다. 회전축에 장력이 수직으로 걸려야 회전하는 물체가 회전축을 중심으로만 회전할 수 있으므로 수직이 되도록 실을 감아야 한다. 그렇지 않을 경우, 물체가 설정한 회전축이 아닌 다른 축으로 회전하므로 실험에 큰 영향을 줄 수 있다.
4) 회전축에 관성 모멘트를 측정하고자 하는 물체를 끼우고 카메라가 물체의 운동면과 수직하도록 설치한 후 켠다.
5) 추를 끝까지 올린 다음 자유낙하 시킨다.
6) Pasco Capstone 프로그램으로 추의 위치를 클릭하여 기록한 후, 그래프를 이차식으로 피팅하고 그 값을 기록한다.(auto-tracking 기능을 이용하여 그래프를 그릴 수도 있다.)
7) 회전 관성을 측정하고자 하는 물체를 이용해 실험을 진행하고 추의 무게를 조절하여 값이 충분히 크도록 한다.
3. auto-tracking 모드 사용과 오차
직접 물체의 위치를 클릭하여 시간에 대한 위치를 기록하는 방법은 처음부터 데이터를 선택할 수 있어 경향에서 벗어나는 경우를 따로 제할 필요가 없다는 장점이 있다. 그러나 데이터의 수가 작다는 단점이 있다. auto-tracking 모드를 사용하는 경우 데이터의 수가 많고, 편리하다는 장점이 있다. 그러나 데이터를 얻은 후에 튀는 값을 따로 제해주어야 한다는 단점이 있다. 직접 물체의 위치 데이터를 측정하는 방법은 실험자에 따라 잔상 등에 의해 물체의 위치를 다르게 볼 수 있다. 이는 여러 번 반복실험을 통해 오차를 줄일 수 있으므로 우연 오차가 발생한다고 말할 수 있다. auto-tracking의 경우 설정한 색깔의 위치를 분석하는 것이므로 측정 프로그램 자체에 의한 계통 오차가 발생할 수 있다.
Ⅳ. 결과 분석 방법
각각의 실험에서 추의 시간에 따른 y좌표를 측정하고, t-y그래프를 이차식으로 피팅한다. y=Ax^2+Bx+C에서 2A가 물체의 가속도에 해당한다.
각 실험의 I_실험에서 첫 번째로 측정한 회전축의 I_실험을 제하는 것에 주의한다.
원판, 수직한 원판(수직축 정리 이용), 고리, 막대의 이론 회전 관성 값은 다음과 같다.
식 (20)을 이용하여 측정한 회전관성 값과 이론 회전관성 값의 오차율을 계산한다.

'과학&공학 > 일반물리학실험' 카테고리의 다른 글
| [일반물리학 실험 #07] 열기관 순환 (Heat Engine Cycle) (0) | 2024.04.28 |
|---|---|
| [일반물리학 실험 #06] 공명관 실험(Resonance Tube) (0) | 2024.04.02 |
| [일반물리학실험 #04] 이차원 운동 (2-Dimensional Motion) (0) | 2021.04.10 |
| [일반물리학실험 #03] 운동량 보존과 충격량 (Conservation of Momentum and Impulse) (2) | 2021.03.21 |
| [일반물리학실험 #02] 뉴턴 제2법칙 (Newton's 2nd Law) (0) | 2021.03.12 |




댓글